Section 3 Isochronous Error
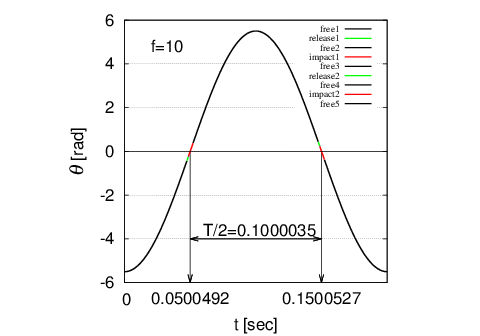
We now have a good approach available to directly read the period. While it is certainly difficult to directly calculate the period, this book introduces the calculation methodology of the precise escapement error by sequentially calculating the displacement ''$\theta$'' for one cycle, utilizing the Runge-Kutta method (RK4). Firstly, deriving each equation of motion separately with regard to three (3) periods of the free vibration, unlocking the escape wheel and the impulse of the balance, the respective equations become as follows: [Period of the free vibration] \begin{eqnarray} I\frac{d^2 \theta}{dt^2}=-c\frac{d \theta}{dt}-k\theta-(\pm)R \end{eqnarray}[Period of unlocking the escape wheel] \begin{eqnarray} I\frac{d^2 \theta}{dt^2}=-(\pm)S-c\frac{d \theta}{dt}-k\theta-(\pm)R \end{eqnarray}[Period of the impulse of the balance] \begin{eqnarray} I\frac{d^2 \theta}{dt^2}=(\pm)M-c\frac{d \theta}{dt}-k\theta-(\pm)R \end{eqnarray}Definition: $I$ : Moment of inertia of the balance wheel $c$ : Viscous damping coefficient $k$ : Spring constant of the hairspring $R$ : Solid friction resistance of the balance pivot $S$ : Load torque of the balance in unlocking the escape wheel $M$ : Impulse torque of the balance As for the plus-minus notation, ''+'' for ''$\omega = d\theta/dt \ge 0$'' and ''-'' for ''$< 0$''. Then, dividing the both sides of the equations (1), (2) & (3) by ''$I$'', each equation becomes the equations (4), (5) & (6) respectively. [Period of the free vibration] \begin{eqnarray} \frac{d^2 \theta}{dt^2}=-\omega_n^2(j\frac{d\theta}{dt}+\theta\pm r) \end{eqnarray}[Period of unlocking the escape wheel] \begin{eqnarray} \frac{d^2 \theta}{dt^2}=-\omega_n^2(j\frac{d\theta}{dt}+\theta\pm s\pm r) \end{eqnarray}[Period of the impulse of the balance] \begin{eqnarray} \frac{d^2 \theta}{dt^2}=-\omega_n^2(j\frac{d\theta}{dt}+\theta-(\pm)m\pm r) \end{eqnarray}Note the equations (7), (8), (9) & (10) below. \begin{eqnarray} j=\frac{c}{k}\\ r=\frac{R}{k} \\ s=\frac{S}{k}\\ m=\frac{M}{k} \end{eqnarray}Here, based on the equation (11), ''$\varepsilon$'' represents the ratio of the unlocking & the impulse torque of the balance. \begin{eqnarray} S=\varepsilon M \end{eqnarray}This ratio is quite dependent on the structure of the escapement. In case of the normal Club Tooth Lever Escapement, ''$\varepsilon$'' will be in the range of ''$0.2 \sim 0.4$'' Definition: $\alpha$=Angle of balance at start of unlocking the escape wheel $\beta$=Angle of balance at end of unlocking the escape wheel $\gamma$=Angle of balance at start of impulse $\eta$=Angle of balance at end of impulse Setting up the above, separating the one period of the balance to nine (9) periods below, and computing the equations (4), (5) & (6) using the Runge-Kutta method (RK4), the escapement error can be represented as follows: -$A_0$〜$\alpha$ Period of free vibration-1 $\alpha$〜$\beta$ Period of unlocking the escape wheel-1 $\beta$〜$\gamma$ Period of free vibration-2 $\gamma$〜$\eta$ Period of impulse of the balance-1 $\eta$〜-$\alpha$ Period of free vibration-3 -$\alpha$〜-$\beta$ Period of unlocking the escape wheel-2 -$\beta$〜-$\gamma$ Period of free vibration-4 -$\gamma$〜-$\eta$ Period of impulse of the balance-2 -$\eta$〜-$A_0$ Period of free vibration-5 As the escapement error ''$\delta$'' is represented as shown in the equation (12), the precise ''$\delta$'' can be calculated by reading off the ''$T/2$'' from the graph for ''$\theta$''. \begin{eqnarray} \delta=86400\frac{T_0-T}{T}=86400(\frac{2\pi}{\omega_0\;T}-1)=86400(\frac{1}{f\;T/2}-1) \end{eqnarray}The figure below shows the calculation result (trial) of the displacement ''$\theta$'' under the conditions below as the example. Conditions: $\alpha = -25^\circ,\; \beta = -15^\circ,\; \gamma = -13^\circ,\; \eta = 22^\circ$, $\varepsilon$ = 0.3, $M = 2.73 \times 10^{-7} [Nm]$, $k = 1.184352528 \times 10^{-6} [Nm/rad]$ , $I = 1.2 \times 10^{-9} [kgm^2]$, $c = 8.41 \times 10^{-11} [Nms]$, $R = 2.85 \times 10^{-9} [Nm]$, Frequency : $f=10$ The half period ''$T/2$'' in this case was ''$0.1000035 [sec]$'' from the figure below. Accordingly, the escapement error ''$\delta$'' can be calculated from the equation (12) as follows: \begin{eqnarray} \delta=86400(\frac{1}{10\times 0.1000035}-1)=-3.023894\;\;[sec/Day] \nonumber \end{eqnarray}Note that the increment in this Runge-Kutta method (RK4) is assumed ''$1 \times 10^{-7}$'' in this case. Although ''$\theta$'' has the accuracy of approximately ''$1 \times 10^{-28}$'' in this case, the accuracy is ''$1 \times 10^{-6}$'' since what we read at this time is the time difference when ''$\theta$'' inverts the plus-minus notation.
|